Neptus
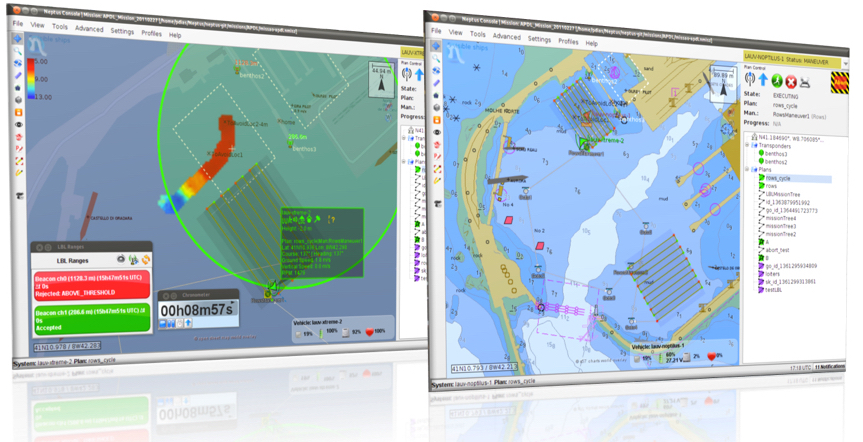
Distributed Command and Control Infrastructure for the operation of all types of unmanned vehicles. Neptus supports the different phases of a typical mission life cycle: planning, simulation, execution and post-mission analysis.
Neptus can be adapted by operators to fit mission-specific requirements and extended by developers through a comprehensive plug-in framework.
See more at: lsts.pt/toolchain/neptus